CS285 深度强化学习 Vol7 | 值函数
在经过Lecture04介绍RL的基本概念之后,Lecture05介绍基于policy的方法,我们直接利用return的梯度进行策略学习,之后我们尝试利用Q或者V来改进policy evaluation步骤,那么我们是否可以直接抛弃参数化的梯度(parameterized policies),转向仅仅利用Q或者V进行RL
0x01 抛弃Actor- critic中的Actor
1.1 回顾Actor- critic
第一步:我们利用现有的policy得到多个采样轨迹$\tau_i$ 第二步:利用数据拟合$\hat V_\phi^\pi(s)$(常见用蒙特卡洛方法、bootstrapped、n-step等方法) 第三步:评估优势策略A 第四步:根据优势策略得到Actor的梯度 第五步:更新Actor的梯度

image-20221102214616955
但是这样存在的潜在问题是方差太大,因为我们拟合出来的state- value- function方差太大,通常我们会做经验重放等方法,但是并不能完全解决这个问题。
所以为什么我们不直接丢到有参的policy,转向生成一个$\pi*$ 𝜋∗=𝑎𝑟𝑔𝑚𝑎𝑥𝑎𝑡𝐴𝜋(𝑠𝑡,𝑎𝑡)
1.2 Policy Evaluation
在探讨上述可能性我们需要先了解一下policy evaluation的概念;也就是从Dynamic programming的来看我们会如何求解问题;同时从policy evaluation我们会逐渐走向value evaluation。
第一步:首先状态转移概率T是均匀的,那么我们可以在Policy evaluation()中得到每个状态下的Q-state-action-list;求平均来得到V-state-list。当然一次计算不够,我们会设置一个epsilon,当V- state变化的最大值都小于这个epsilon的时候停止更新。说明我们得到所有状态下的V- state 第二步:在得到V- state下我们便能判断什么action是好的,那么我们就利用Q- state- action与V- state之间的关系来选择不同state下的最优action,重新分配概率,也就是policy evaluation 第三步:由于policy evaluation会重新改变空间。V- state也会改变,所以需要重新计算Policy evaluation,直到收敛。
Policy evaluation与Value evaluation之间的区别在于Policy evaluation中根据Q- state- value-list得到V- state-list是求期望,还是求最大值的方式。

image-20221102221107185
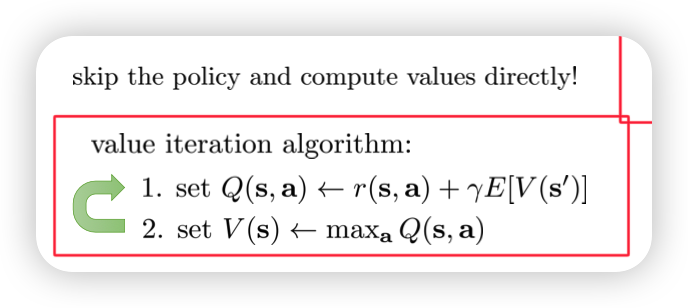
image-20221102221124987
这里参考,可以很清晰的看出policy evaluation,以及value evaluation对其做了什么简化
0x02 Fitted value iteration and Q- iteration
2.1 我们如何表示state- value- function V(s)
在数量较少的离散中我们可以使用表格或者什么来记录,但是对于连续空间我们可能无能为力。所以我们可以使用神经网络来实现两者的近似,也就是转换为
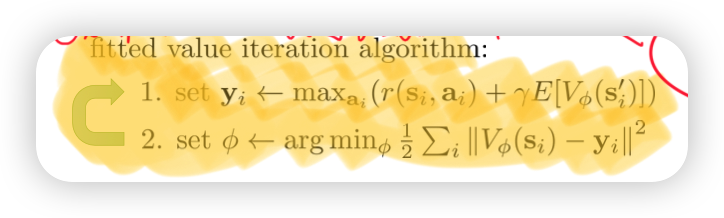
image-20221102221230276
2.2 仍然有问题
因为在离散状态下,我们需要知道状态概率转移方式。我们会假设一个平均概率再重新分配的方式来更新转移概率。但是在连续情况下虽然我们知道拟合拟合出state- value- function,但是我们还不知道状态转移概率,所以我们求解不出state- value- function
但是为什么我们需要state- function?直接利用state- action- function来取最大值就行
但是这样我们并不能保证收敛性

image-20221102221836862
0x03 Q- learning method
3.1 Q-iteration 的一些性质

image-20221102222232800
- 它是off- policy的
- 等价优化bellman error
3.2 Online Q- learning
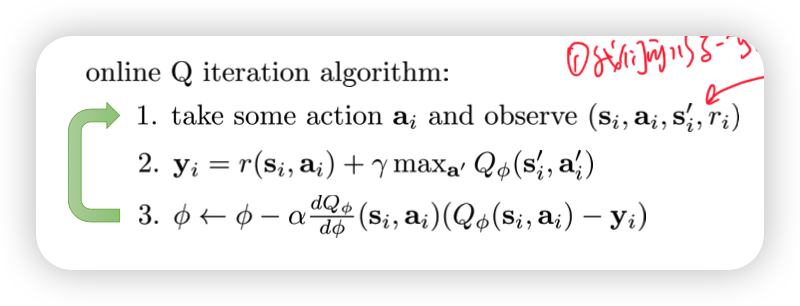
image-20221102222533482
通常会需要一些exploration
- $\epsilon-greedy$
- Boltzman exploration
0x04 Value Functions in Theory
我们需要尝试解释之前取最大值的方式是否可以收敛(converge)

image-20221102222722182
- MDP中的bellman一定是收敛的
- 在利用近似网络(function approximation)的方式下并不收敛
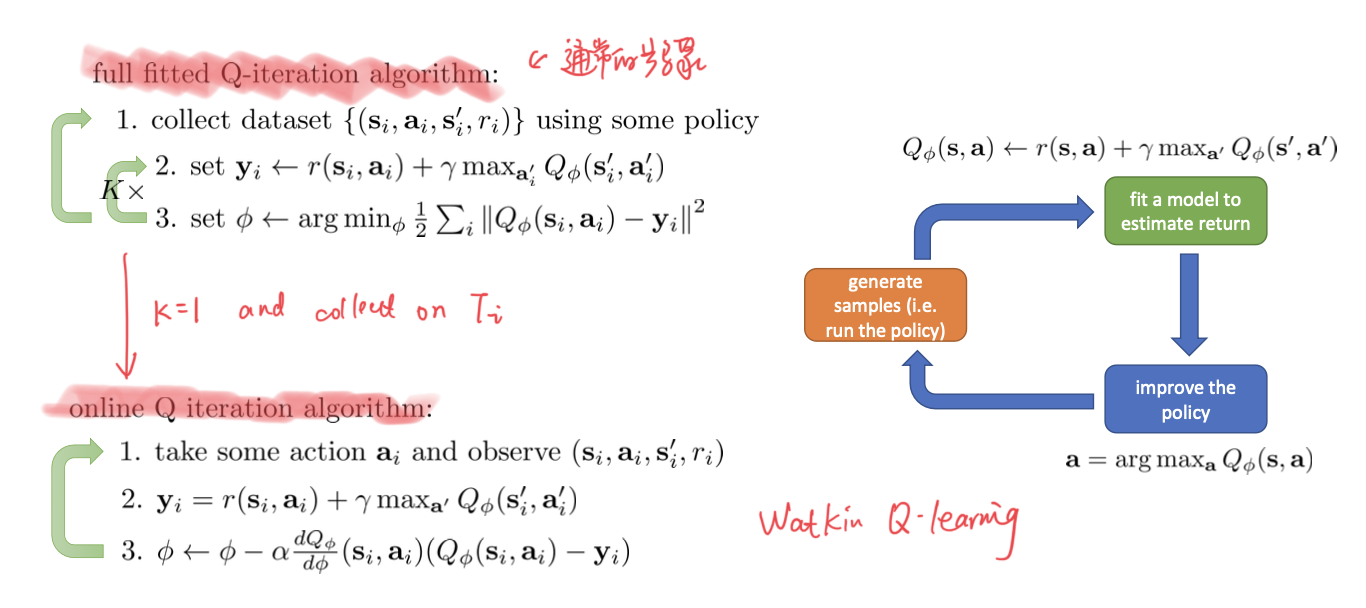
image-20221102223053608
我们得到一个非常sad corollary,但是在下一张的DQN中可以让它变的更好